Thank you very much for sharing your excellent DIY measurement and analysis ideas!Pointing stability was then measured by ...



-
Welcome to BirdForum, the internet's largest birding community with thousands of members from all over the world. The forums are dedicated to wild birds, birding, binoculars and equipment and all that goes with it.
Please register for an account to take part in the discussions in the forum, post your pictures in the gallery and more.

You are using an out of date browser. It may not display this or other websites correctly.
You should upgrade or use an alternative browser.
You should upgrade or use an alternative browser.
Does the Head Rest help on the NL 8x42? (2 Viewers)
- Thread starter Dennis Mau
- Start date
More options
Who Replied?This is a matter of taste. I've used the Canon 12x36 IS III and I own the Nikon 10x25 IS. Both are ok but I prefer the optical quality, ergonomics, wide field, etc, of a classic excellent binocular.Hi,
I use 2 KITE stabilized binoculairs for 3 months now for birding, a 12x42 and a 16x42.... I would never return to a non stabilized ever! When glassing now, with my 8x42 normal binoculair... shaking is more visible then ever before! I believe stabilized binoculairs are the future... even at lower magnifications?
But make me a NL Pure 10x32 IS and I may change my mind.
PeterPS
Well-Known Member

Rigorous analysis, it reads as a paper in a semitechnical journal, thanks for it. The generality of the results, however, may be questioned:Rather than shell out almost £3k for the Swarovski binoculars to test the forehead rest, I opted to make such a rest, customised to the shape of my forehead, for my Zeiss 10x42 T*FL binoculars.
Pointing stability was then measured by strapping a Motorola G7 Power Android smartphone to the optics and using the SensorData application to read out the 3-axis rate gyro data from the embedded Bosch BMI160 MEMS Inertial Measurement Unit. The data was sampled at 200 Hz and exported to the LibreOffice Calc spreadsheet for analysis. Measurements were taken with and without the forehead rest in position. Two stances were adopted: holding the binoculars with the elbows supported on a table while sitting, as might be done in a hide; and also while standing without other support. These four measurement sets were taken in rapid succession to ensure a uniform level of observer capability. Each measurement lasted for about a minute, and had large startup and shutdown transients associated with picking up and setting down the binoculars. These transients were removed from the dataset before further processing.
The output of the smartphone app consists of angular rates of change with time, but the angle time series was needed to assess hand shake amplitude. This was derived by cumulative summing of the rates of change. The output angle time series showed the expected fluctuations due to hand shake, superimposed on an apparently linear gyro drift. This drift was fairly consistent between measurements, but differed significantly among the three axes, and was never more than 1 mr/s. A linear regression analysis allowed removal of the gyro drift, and the hand shake amplitude appeared as the standard error in the regressive fit. These standard errors were found for each of the three orthogonal axes for the four cases described above. These are tabulated below (1mr = ‘1 in 1000’ = 3.4 minutes of arc) with roll, pitch and yaw axes defined as usual.
Hand shake magnitude (milliradians)
It must be emphasised that is a moot point what can be read into these figures. The gyro drift might not be linear; even more to the point, holding binoculars still is mildly stressful, and performance degrades as tiredness sets in. The results were obtained by standard simple error analysis, with an assumption of a Gaussian error distribution, which may not be a good model, and the ‘error in the error’ cannot easily be found. Some appreciation of the latter could be obtained by multiple repeats of the measurement process, for which I lack the patience.
Comparing standing with sitting (elbows supported), it is evident, and unsurprising, that the pointing accuracy is improved in all axes by sitting. This improvement is about 3 - 4 times, with or without the forehead rest, except in yaw where it is a little less when standing. Comparing the performance with and without the forehead rest, it is seen that when sitting there is a substantial improvement of almost a factor of two in pitch with the rest in position. This might well be expected; however the improvement by about a factor of 1.5 in yaw is more surprising. When standing, the presence of the rest appears to mildly degrade performance in roll and pitch, but improve in yaw: as remarked above, caution should be applied to small changes.
In a separate analysis of the raw angular rate data using MATLAB, the gyro performance was checked by observing the noise floor spectrum while stationary and while rotated at 33.33 rpm. Its level was consistent with the specification of the device. The spectrum of the fluctuation rate revealed that most of the hand shake took place at low frequencies, below 15 Hz, as would be expected; more surprising (to the writer) there were clear spikes at 6.5, 9.8 and 10.9 Hz, which arise from natural hand tremor. This tremor was not apparent to the writer.
In summary, for this user:
-you used a DIY rest, and not all forehead rests are equal
-you collected time series data over a rather short interval (less than 1min, after you eliminated the transients); analysis of data collected over longer intervals (3-5min or even longer) might lead to different conclusions.
-the results can be expected to depend a lot on the user, as well as on the scenario (such as using the binos after climbing a hill).
Last edited:
davewilletts
Member

1. I like to think that the forehead rest was pretty good - not a lashed together job. See the attached photos.
2. You are right, but I struggle to maintain good pointing without ANY glitches for much longer. Averaging of several runs could be done, but there seems to be little point in view of the lack of any obvious dramatic improvement with use of the rest.
3. Again you are right, but I suspect that the relative performance changes between rest/no rest, and sitting/standing, are much the same for most users. And of course after exercise everything degrades, but I try to avoid birdwatching after vigorous exercise!

2. You are right, but I struggle to maintain good pointing without ANY glitches for much longer. Averaging of several runs could be done, but there seems to be little point in view of the lack of any obvious dramatic improvement with use of the rest.
3. Again you are right, but I suspect that the relative performance changes between rest/no rest, and sitting/standing, are much the same for most users. And of course after exercise everything degrades, but I try to avoid birdwatching after vigorous exercise!
davewilletts
Member
I broadly agree. However it could be argued that the improvement in pitch pointing when sitting is marginally worth having, at the inconvenience of the protruding rest.
'Are you sure the benefit you see why sitting and using the forehead rest was not just because you were sitting? How did you isolate the benefit of the forehead rest and sitting?' - I am not quite sure what you mean by isolate: the comparison was between measurements taken while sitting, with or without the forehead rest.
I should have pointed out that I do not use spectacles, and that the binos were pressed well into my eye sockets to steady them. And really I have implied too much accuracy in the table - a single digit after the decimal point probably still exaggerates the precision, given the lack of averaging several 'runs' and possible onset of fatigue.
'Are you sure the benefit you see why sitting and using the forehead rest was not just because you were sitting? How did you isolate the benefit of the forehead rest and sitting?' - I am not quite sure what you mean by isolate: the comparison was between measurements taken while sitting, with or without the forehead rest.
I should have pointed out that I do not use spectacles, and that the binos were pressed well into my eye sockets to steady them. And really I have implied too much accuracy in the table - a single digit after the decimal point probably still exaggerates the precision, given the lack of averaging several 'runs' and possible onset of fatigue.
Nice pictures! That is a pretty nice forehead rest you fabricated. Looks almost the Swarovski one!1. I like to think that the forehead rest was pretty good - not a lashed together job. See the attached photos.
2. You are right, but I struggle to maintain good pointing without ANY glitches for much longer. Averaging of several runs could be done, but there seems to be little point in view of the lack of any obvious dramatic improvement with use of the rest.
3. Again you are right, but I suspect that the relative performance changes between rest/no rest, and sitting/standing, are much the same for most users. And of course after exercise everything degrades, but I try to avoid birdwatching after vigorous exercise!View attachment 1363845View attachment 1363846

Hi Dave,
Thanks a lot for sharing method and results of your experiment!
Is the 200 Hz sample rate a necessity? I found an an App "SensorRecord", and it only reads the gyro at 100 Hz, so I wonder if that's good enough. Do you have an URL (or the publisher's name) for the SensorData app you mentioned? I get ambiguous results from the Playstore based on the name alone.
How do you think about translational acceleration data? I vaguely wonder if it can be used to cross-check the rotational data, or maybe add something to the evaluation.
That's interesting ... my own forehead rest did seem to improve accuracy noticably even when standing, but I didn't actually take any measurements (though I toyed with the idea). How far above the eyes does your rest contact the forehead? I wonder if that makes a difference for the results. On the other hand, maybe the fact that I was using the binoculars with glasses makes a greater difference ...
Regards,
Henning
Thanks a lot for sharing method and results of your experiment!
Pointing stability was then measured by strapping a Motorola G7 Power Android smartphone to the optics and using the SensorData application to read out the 3-axis rate gyro data from the embedded Bosch BMI160 MEMS Inertial Measurement Unit. The data was sampled at 200 Hz and exported to the LibreOffice Calc spreadsheet for analysis.
Is the 200 Hz sample rate a necessity? I found an an App "SensorRecord", and it only reads the gyro at 100 Hz, so I wonder if that's good enough. Do you have an URL (or the publisher's name) for the SensorData app you mentioned? I get ambiguous results from the Playstore based on the name alone.
How do you think about translational acceleration data? I vaguely wonder if it can be used to cross-check the rotational data, or maybe add something to the evaluation.
Comparing standing with sitting (elbows supported), it is evident, and unsurprising, that the pointing accuracy is improved in all axes by sitting. This improvement is about 3 - 4 times, with or without the forehead rest, except in yaw where it is a little less when standing. Comparing the performance with and without the forehead rest, it is seen that when sitting there is a substantial improvement of almost a factor of two in pitch with the rest in position. This might well be expected; however the improvement by about a factor of 1.5 in yaw is more surprising. When standing, the presence of the rest appears to mildly degrade performance in roll and pitch, but improve in yaw: as remarked above, caution should be applied to small changes.
That's interesting ... my own forehead rest did seem to improve accuracy noticably even when standing, but I didn't actually take any measurements (though I toyed with the idea). How far above the eyes does your rest contact the forehead? I wonder if that makes a difference for the results. On the other hand, maybe the fact that I was using the binoculars with glasses makes a greater difference ...
Regards,
Henning
Regarding the sampling rate of analogue-digital converters: Shannon's sampling theorem [2] always applies, which means that the sampling frequency must be at least 2x as large as the highest signal frequency (here, human tremor). To avoid errors, A/D converters [1] have low-pass filters that are not ideal, so it is not only their cut-off frequency that matters but also their order. A 1st order low pass achieves - 20 db per frequency decade.Is the 200 Hz sample rate a necessity? I found an an App "SensorRecord", and it only reads the gyro at 100 Hz, so I wonder if that's good enough. Do you have an URL (or the publisher's name) for the SensorData app you mentioned? I get ambiguous results from the Playstore based on the name alone.
How do you think about translational acceleration data? I vaguely wonder if it can be used to cross-check the rotational data, or maybe add something to the evaluation.
Tiefpass – Wikipedia
Now you could look for data sheets of IS binoculars, see which frequencies are important. I would then suggest >= 3-fold sampling frequency because of non-ideal low pass filters of AD converters of the gyro sensor.
Imho, a sensible evaluation programme should determine the sampling rate of the A/D converter of the gyro sensor. The A/D converter can only provide data according to its design and specifications. Why change it? Users of A/D converters need to know which signal frequencies they can be used for. For this purpose, the manufacturer specifies the maximum sampling rate and filter data on the cut-off frequency. Gyro sensors in smartphones are now a combination of analogue sensor and A/D converter. Therefore, one "only" has to consider the specs of the combination.
If an evaluation programme does not comply with these specs and omits intermediate values, Shannon's sampling theorem is violated. The evaluation programme with user input may at most configure the A/D converter (and filter parameter). The user must then think along with it. Therefore Mr. Shannon. ;-)
In "short": I wouldn't change anything about sampling rates - but check:
1. does the "app" match the specs of the sensor-A/D converter combination? Does it read out all the data? Omitting values can easily lead to the violation of the sampling theorem!
2. does the A/D conversion of the gyro sensor comply with the sampling theorem for measuring hand tremor? Is this digital measuring instrument suitable for the measurement project?
3. For the visual data display: You need about 10 measured values for 1 harmonic signal period. For non-harmonic signals, which can be composed of several harmonic signals, the highest signal frequency (periond duration T = 1/f ) counts.
On rotation and translation: Translations of binoculars imho lead to far less image shift than rotations. For this purpose, imagine the extension of an aeroplane or ship in relation to binoculars in order to estimate the different effects of angular changes due to rotation versus translation.
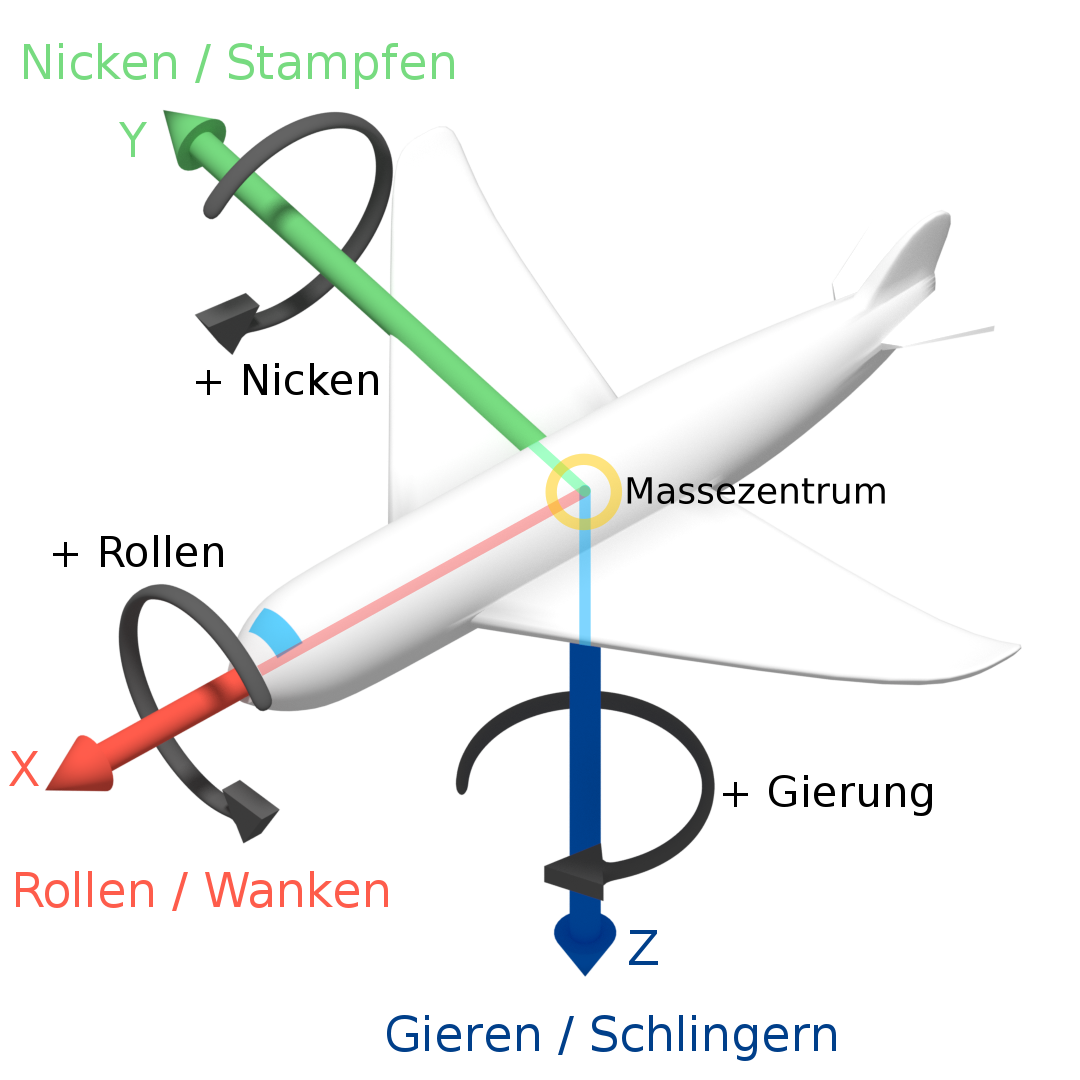
Roll-Nick-Gier-Winkel – Wikipedia
Gierachse – Wikipedia
In total, the movement of rigid bodies (or individual parts in the case of deformations) can be described mathematically with 6 degrees of freedom, 3 translations and 3 rotations in an xyz coordinate system. This then results in simple and therefore elegant matrix equations.
Edit:
I better attach a links.
[1]

Analog-to-digital converter - Wikipedia
https://en.wikipedia.org/wiki/Nyquist–Shannon_sampling_theorem
Last edited:
It may sound like a smart-ass, but 2 tips anyway:A linear regression analysis allowed removal of the gyro drift, and the hand shake amplitude appeared as the standard error in the regressive fit. These standard errors were found for each of the three orthogonal axes for the four cases described above.
1. you have cut off transients/spikes. Further "outliers" of measured values can be "smoothed" by means of numerical mathematics programs and polynomial interpolation, visualise measured values and "play" with parameters of the polynomial, compare polynomial with measured value visualisation. This is halfway suitable for displaying measured oscillations.
2. the overall result (jitter + drift) can be decomposed into several harmonic signals by Fourier transformation (DFT, FFT) and try to subtract the "drift functions". As well as other signals that appear faulty. At the end, put the individual functions together again.
3. Presumably, mathematics programmes also offer ready-made filter functions (band pass) whose parameters can be changed. Is then basically the same as 2.
Statisticians have different methods than technicians. ;-)
Last edited:
davewilletts
Member
I broadly agree. However it could be argued that the improvement in pitch pointing when sitting is marginally worth having, at the inconvenience of the protruding rest.Awesome testing! So your results show you might as well just sit down and support the binoculars with your elbows as use the headrest. Standing is when the forehead rest would be most beneficial, and it doesn't do squat then. So forget the forehead rest is a bust. When I tried one on my NL 8x42 I saw no improvement at all when I was standing or sitting. Are you sure the benefit you see why sitting and using the forehead rest was not just because you were sitting? How did you isolate the benefit of the forehead rest and sitting?
'Are you sure the benefit you see why sitting and using the forehead rest was not just because you were sitting? How did you isolate the benefit of the forehead rest and sitting?' - I am not quite sure what you mean by isolate: the comparison was between measurements taken while sitting, with or without the forehead rest.
I should have pointed out that I do not use spectacles, and that the binos were pressed well into my eye sockets to steady them. And really I have implied too much accuracy in the table - a single digit after the decimal point probably still exaggerates the precision, given the lack of averaging several 'runs' and possible onset of fatigue.
1. I have only removed the huge transients which result from picking the binoculars up and putting them down, since it is very difficult to start and stop the recording process while looking at a 'target'. I have not doctored the steady observation data at all.It may sound like a smart-ass, but 2 tips anyway:
1. you have cut off transients/spikes. Further "outliers" of measured values can be "smoothed" by means of numerical mathematics programs and polynomial interpolation, visualise measured values and "play" with parameters of the polynomial, compare polynomial with measured value visualisation. This is halfway suitable for displaying measured oscillations.
2. the overall result (jitter + drift) can be decomposed into several harmonic signals by Fourier transformation (DFT, FFT) and try to subtract the "drift functions". As well as other signals that appear faulty.
It may sound like a smart-ass, but 2 tips anyway:
1. you have cut off transients/spikes. Further "outliers" of measured values can be "smoothed" by means of numerical mathematics programs and polynomial interpolation, visualise measured values and "play" with parameters of the polynomial, compare polynomial with measured value visualisation. This is halfway suitable for displaying measured oscillations.
2. the overall result (jitter + drift) can be decomposed into several harmonic signals by Fourier transformation (DFT, FFT) and try to subtract the "drift functions". As well as other signals that appear faulty. At the end, put the individual functions together again.
3. Presumably, mathematics programmes also offer ready-made filter functions (band pass) whose parameters can be changed. Is then basically the same as 2.
Statisticians have different methods than technicians. ;-)
Statisticians have different methods than technicians. ;-)
2. Plainly the spectrum can be obtained, as was done for the angular rate data, but I don't know what the gyro drift features were to correct for them. The large 'human factors' effects like fatigue and cramp suggest that it is not worth massaging this data to death; I was looking for obvious features.
In this context, I am just thinking about what to do with the (high) signal frequencies and acceleration amplitudes caused by impulses. Pulses are generated by the impact of the binoculars or the forehead support on the head. Press as firmly as possible? Unpleasant. What effect does this have on the measurement objective (purpose): indirect comparison of image displacement via accelerations, not comparison of accelerations per se.1. I have only removed the huge transients which result from picking the binoculars up and putting them down, since it is very difficult to start and stop the recording process while looking at a 'target'. I have not doctored the steady observation data at all.
Is pressing on really feasible in practice and how do impulses distort the evaluation of accelerations when bins with forehead rest not pressing on? I think we should finally think about this. Thinking is not so fast for me. ;-)
In any case, an interesting experiment that stimulates thought. Thanks again for this!
Last edited:
davewilletts
Member
Hi HenningHi Dave,
Thanks a lot for sharing method and results of your experiment!
Is the 200 Hz sample rate a necessity? I found an an App "SensorRecord", and it only reads the gyro at 100 Hz, so I wonder if that's good enough. Do you have an URL (or the publisher's name) for the SensorData app you mentioned? I get ambiguous results from the Playstore based on the name alone.
How do you think about translational acceleration data? I vaguely wonder if it can be used to cross-check the rotational data, or maybe add something to the evaluation.
That's interesting ... my own forehead rest did seem to improve accuracy noticably even when standing, but I didn't actually take any measurements (though I toyed with the idea). How far above the eyes does your rest contact the forehead? I wonder if that makes a difference for the results. On the other hand, maybe the fact that I was using the binoculars with glasses makes a greater difference ...
Regards,
Henning
I don't think I have got the hang of using the reply feature in this forum!
The app I used was Sensordata 1.8.2.0 APK and it seems to be associated with com.matlabgeeks.gaitanalyzer. The 200 Hz sample rate is the default, a much lower rate would be adequate because the shake is limited to low frequencies, nothing much above 20 Hz, so a 40 Hz or more sampling rate would be fine (Shannon's theorem). I chose this app because the first I tried - name forgotten - only read out rates to a precision of 0.1 rad/s which was inadequate for the job.
I don't believe translational data would add anything, as explained at length by Jessie 66.
My rest contacts a patch of my forehead about 4 cm wide by 3 cm high, from the brow upwards; some detail is in the photos.
Wearing glasses may well make a difference too.
Regards
Dave
Regarding post #152:
Another simply DIY method, I think a better method, as there are fewer possibilities for error (direct results, no rotation/translation derivation from acceleration values):
 www.cloudynights.com
(post #58)
www.cloudynights.com
(post #58)
Addendum:
I thought about the evaluation distortion caused by impulses: The forehead support is damped with a soft material, impulses hardly occur. People who wear glasses can generate impulses by lightly hitting the eyecups against the glasses, which only lead to slight rotations/image shifts but with high accelerations. This falsifies evaluations of the image shift via accelerations. The low-pass filter of the A/D converter of the gyro sensor counteracts this somewhat, but it is difficult to predict to what extent. Distorting, because higher accelerations with low rotations can also occur when trembling movements of the eyecups are slowed down by the eye sockets. I see the main problem of the method in quickly decelerated movements with low rotation and thus low image shift. I think a direct method (see link above) is better.
Nevertheless, I like the unusual use of sensors from readily available devices for measurements elsewhere.
Another simply DIY method, I think a better method, as there are fewer possibilities for error (direct results, no rotation/translation derivation from acceleration values):
Binocular Resolution Testing w/USAF Charts - Page 3 - Binoculars - Cloudy Nights
Page 3 of 4 - Binocular Resolution Testing w/USAF Charts - posted in Binoculars: When testing the central vision of an eye we use a 10 deg field. This is measured from the center of fixation. This results in a 20 deg edge to edge field. Photopic acuity drops off rapidly after that. There is a...
Addendum:
I thought about the evaluation distortion caused by impulses: The forehead support is damped with a soft material, impulses hardly occur. People who wear glasses can generate impulses by lightly hitting the eyecups against the glasses, which only lead to slight rotations/image shifts but with high accelerations. This falsifies evaluations of the image shift via accelerations. The low-pass filter of the A/D converter of the gyro sensor counteracts this somewhat, but it is difficult to predict to what extent. Distorting, because higher accelerations with low rotations can also occur when trembling movements of the eyecups are slowed down by the eye sockets. I see the main problem of the method in quickly decelerated movements with low rotation and thus low image shift. I think a direct method (see link above) is better.
Nevertheless, I like the unusual use of sensors from readily available devices for measurements elsewhere.
Last edited:
Jessie. I agree with you. I think resolution testing would be a better way to test the Forehead rest. Why don't you do it? It would be a great experiment! Maybe you could even throw in some IS binoculars to see how they compare.Regarding post #152:
Another simply DIY method, I think a better method, as there are fewer possibilities for error (direct results, no rotation/translation derivation from acceleration values):
(post #58)Binocular Resolution Testing w/USAF Charts - Page 3 - Binoculars - Cloudy Nights
Page 3 of 4 - Binocular Resolution Testing w/USAF Charts - posted in Binoculars: When testing the central vision of an eye we use a 10 deg field. This is measured from the center of fixation. This results in a 20 deg edge to edge field. Photopic acuity drops off rapidly after that. There is a...
Addendum:
I thought about the evaluation distortion caused by impulses: The forehead support is damped with a soft material, impulses hardly occur. People who wear glasses can generate impulses by lightly hitting the eyecups against the glasses, which only lead to slight rotations/image shifts but with high accelerations. This falsifies evaluations of the image shift via accelerations. The low-pass filter of the A/D converter of the gyro sensor counteracts this somewhat, but it is difficult to predict to what extent. Distorting, because higher accelerations with low rotations can also occur when trembling movements of the eyecups are slowed down by the eye sockets. I see the main problem of the method in quickly decelerated movements with low rotation and thus low image shift. I think a direct method (see link above) is better.
Nevertheless, I like the unusual use of sensors from readily available devices for measurements elsewhere.
Dennis, post #155:
I'm not going to test it myself:
1. I don't have Swaro NL, would have to make a makeshift forehead rest for one of my mid-range binoculars.
2. I don't wear glasses, therefore I would have to buy one made with window glass: Analysis of previous posts and historical advertising brochures of vintage porros (thanks to John A. Roberts) [1] shows that forehead rests tend to help spectacle wearers at magnifications >= 10x.
3. if I had a problem with tremor and high magnifications, I would choose IS binoculars and not stopgap solutions like forehead rests.
4. Swarovski has probably carried out meaninful tests with n (n >> 1) people . But do they at least publish or name test results? You should ask Swaro. ;-)
[1] SpectaRoss 8x40: https://www.birdforum.net/threads/does-the-head-rest-help-on-the-nl-8x42.394532/page-2#post-4064720
(1st picture)
I'm not going to test it myself:
1. I don't have Swaro NL, would have to make a makeshift forehead rest for one of my mid-range binoculars.
2. I don't wear glasses, therefore I would have to buy one made with window glass: Analysis of previous posts and historical advertising brochures of vintage porros (thanks to John A. Roberts) [1] shows that forehead rests tend to help spectacle wearers at magnifications >= 10x.
3. if I had a problem with tremor and high magnifications, I would choose IS binoculars and not stopgap solutions like forehead rests.
4. Swarovski has probably carried out meaninful tests with n (n >> 1) people . But do they at least publish or name test results? You should ask Swaro. ;-)
[1] SpectaRoss 8x40: https://www.birdforum.net/threads/does-the-head-rest-help-on-the-nl-8x42.394532/page-2#post-4064720
(1st picture)
Last edited:
I agree with you on choosing IS binoculars over the forehead rest. I wonder if Swarovski has done any testing of the forehead rest to see if it is actually effective. I think resolution testing is the best way to see if the forehead rest works though. Kimmo where are you?Dennis, post #155:
I'm not going to test it myself:
1. I don't have Swaro NL, would have to make a makeshift forehead rest for one of my mid-range binoculars.
2. I don't wear glasses, therefore I would have to buy one made with window glass: Analysis of previous posts and historical advertising brochures of vintage porros (thanks to John A. Roberts) [1] shows that forehead rests tend to help spectacle wearers at magnifications >= 10x.
3. if I had a problem with tremor and high magnifications, I would choose IS binoculars and not stopgap solutions like forehead rests.
4. Swarovski has probably carried out meaninful tests with n (n >> 1) people . But do they at least publish or name test results? You should ask Swaro. ;-)
[1] SpectaRoss 8x40: https://www.birdforum.net/threads/does-the-head-rest-help-on-the-nl-8x42.394532/page-2#post-4064720
(1st picture)
dave,
Did you try a few different configurations for the headrest? What I mean is that I noticed I would end up with two different settings depending on whether I created a... weld(?) by starting to adjust the FHR and then the eyecups accordingly, and visa versa. This might not make a darn bit of difference, but I did notice different levels of contact, stability, and comfort depending on which part was adjusted first. This may not apply whatsoever since your FHR is not identical to the factory part, but it may? I stumbled on it by accident after trying to use the FHR to float the glass (cups fully collapsed) in front of my face as another user mentioned.
Last bit that might throw a very small variable in there is the flex of the factory part. Swaro wouldn't tell me that they made those posts too long but it sure looks that way considering the matching contours that appear to be designed to accommodate flush fitment between leading edge and the hinge. Without that larger contact area the darn thing has a lot more flex than I'd care for from a $140 part.
Goes without saying, awesome work and thanks for the info!
P.S. holding binos to 1 mil? Never tried to measure, but it's a safe bet that your hands are way steadier than mine!
Did you try a few different configurations for the headrest? What I mean is that I noticed I would end up with two different settings depending on whether I created a... weld(?) by starting to adjust the FHR and then the eyecups accordingly, and visa versa. This might not make a darn bit of difference, but I did notice different levels of contact, stability, and comfort depending on which part was adjusted first. This may not apply whatsoever since your FHR is not identical to the factory part, but it may? I stumbled on it by accident after trying to use the FHR to float the glass (cups fully collapsed) in front of my face as another user mentioned.
Last bit that might throw a very small variable in there is the flex of the factory part. Swaro wouldn't tell me that they made those posts too long but it sure looks that way considering the matching contours that appear to be designed to accommodate flush fitment between leading edge and the hinge. Without that larger contact area the darn thing has a lot more flex than I'd care for from a $140 part.
Goes without saying, awesome work and thanks for the info!
P.S. holding binos to 1 mil? Never tried to measure, but it's a safe bet that your hands are way steadier than mine!
Hi,
My own 3D printed headrest, being mounted on the forward end of the bridge, was quite flexible due to geometry and material choice.
I speculated that might actually be an advantage, by dampening some of the vibrations instead of transferring them.
However, that's just a thought, and it might well be that flex actually affects different geometries in different ways.
Regards,
Henning
Last bit that might throw a very small variable in there is the flex of the factory part. Swaro wouldn't tell me that they made those posts too long but it sure looks that way considering the matching contours that appear to be designed to accommodate flush fitment between leading edge and the hinge. Without that larger contact area the darn thing has a lot more flex than I'd care for from a $140 part.
My own 3D printed headrest, being mounted on the forward end of the bridge, was quite flexible due to geometry and material choice.
I speculated that might actually be an advantage, by dampening some of the vibrations instead of transferring them.
However, that's just a thought, and it might well be that flex actually affects different geometries in different ways.
Regards,
Henning

I would like to add my experience to this thread. I just received my FRP headrest for my recently purchased 8x42 Nl. I am in my late 70's and have a small amount of old man shake. I wear progressive eye glasses. My first impression was the headrest made little difference in how I could steady my 8x42Nl. Then, I realized I was using the head rest incorrectly. For the best stabilization one must make 3 point contact which includes the headrest, and your glasses firmly against the eyecups. This 3 point contact is like a miniature tripod on your face. My initial trial was with the forehead only, which did nothing for stabilization although it felt haveing my eyeglasses free from conctact with the binocular.
Did the headreast make a big difference for me? To be honest, no. Yet the difference for me was definite. Was it worth $150? Probably not, but when you have already spent 3 grand on these binoculars, what's another $150. Especially when you are talking about minute improvements in alpha optics, minute improvements often come at a higher cost.
Did the headreast make a big difference for me? To be honest, no. Yet the difference for me was definite. Was it worth $150? Probably not, but when you have already spent 3 grand on these binoculars, what's another $150. Especially when you are talking about minute improvements in alpha optics, minute improvements often come at a higher cost.
Hi,
Ah, good idea to mention that explicitely!
I'm using it in the same way, and just like you, I feel the headrest (of my own design, on a pair of Nikons) improve stability a bit.
(I have used my smartphone's gyroscope to capture a recording of the shake with and without headrest, but haven't gotten around to evaluating the raw data yet.)
Regards,
Henning
For the best stabilization one must make 3 point contact which includes the headrest, and your glasses firmly against the eyecups. This 3 point contact is like a miniature tripod on your face.
Ah, good idea to mention that explicitely!
I'm using it in the same way, and just like you, I feel the headrest (of my own design, on a pair of Nikons) improve stability a bit.
(I have used my smartphone's gyroscope to capture a recording of the shake with and without headrest, but haven't gotten around to evaluating the raw data yet.)
Regards,
Henning
Users who are viewing this thread
Total: 3 (members: 0, guests: 3)